1.項(xiàng)目概述
1.1項(xiàng)目背景
東方宏業(yè)在甘肅省西峰區(qū)承接的石油管線測(cè)量任務(wù),要求成果為測(cè)區(qū)內(nèi)17條石油輸送管道以及管道左右500米范圍內(nèi)的正射影像以及地形圖�����。
1.2測(cè)區(qū)基本情況
測(cè)區(qū)位于甘肅省西峰區(qū),測(cè)區(qū)高差大����,最高處和最低處約300米高差�����。氣候條件比較惡劣�����,山區(qū)風(fēng)速較大且風(fēng)向不定����,中午過(guò)后風(fēng)速最大可到12m/s。
1.3成果要求
最終生成的成果為正攝影像圖(包含總圖和分幅圖)����、數(shù)字線畫(huà)圖
2.技術(shù)路線
針對(duì)實(shí)際測(cè)區(qū)情況,以高精度得成果要求為標(biāo)準(zhǔn)�,項(xiàng)目基于智航SF700A旋翼無(wú)人平臺(tái)搭載S24單鏡頭相機(jī),借助相配套的南方航測(cè)數(shù)據(jù)處理軟件體系����,設(shè)計(jì)總體技術(shù)路線如下圖所示:
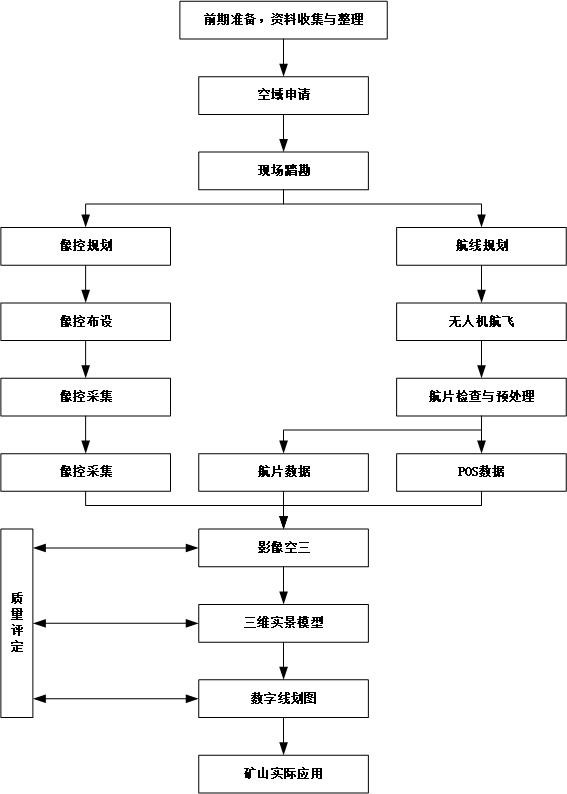
圖1:技術(shù)路線
(1)像控點(diǎn)布設(shè)。為滿足項(xiàng)目中多個(gè)環(huán)節(jié)得處理及檢查要求��,需要在測(cè)區(qū)內(nèi)選取和實(shí)測(cè)一定數(shù)量的像控點(diǎn)���。
(2)航測(cè)影像數(shù)據(jù)獲取��。利用旋翼無(wú)人機(jī)飛行平臺(tái)�,搭載鏡頭設(shè)備,進(jìn)行航測(cè)影像數(shù)據(jù)獲取�。
(3)照片數(shù)據(jù)預(yù)處理。無(wú)人機(jī)外業(yè)作業(yè)完成后�����,需要對(duì)差分?jǐn)?shù)據(jù)和照片進(jìn)行整理����,包括POS和照片分組對(duì)齊、相片重命名等操作��。
(4)影像空三�。航測(cè)影像數(shù)據(jù)預(yù)處理完成后,依據(jù)影像POS信息�����、控制點(diǎn)信息����,進(jìn)行空中三角測(cè)量�����。
(5)成果數(shù)據(jù)生產(chǎn)。數(shù)字正射影像�。
(6)數(shù)字線劃圖生產(chǎn)。在三維數(shù)據(jù)采集軟件中���,基于礦山三維實(shí)景模型采集地物屬性信息和空間要素信息�����,生成礦山的數(shù)字線劃圖�����。
3.方案實(shí)施:
3.1像控點(diǎn)布設(shè)采集
借助南方航次一體化處理軟件����,提前規(guī)劃好像控點(diǎn)��,在滿足要求的前提下��,盡量在礦區(qū)固定標(biāo)識(shí)物�。同時(shí)���,將規(guī)劃好的像控分布通過(guò)云端服務(wù)器上傳至云端服務(wù)器,為實(shí)際像控采集提供依據(jù)�����。
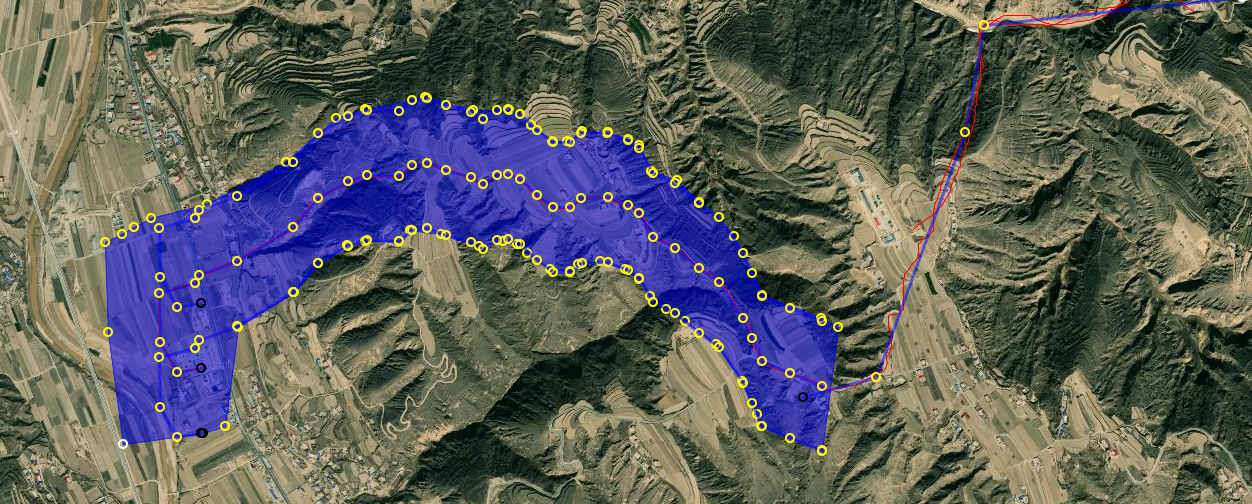
圖2:像控點(diǎn)規(guī)劃
通過(guò)像控之星軟件�����,連接云端服務(wù)器�,下載規(guī)劃好的像控分布圖,在現(xiàn)場(chǎng)布設(shè)采集像控����。
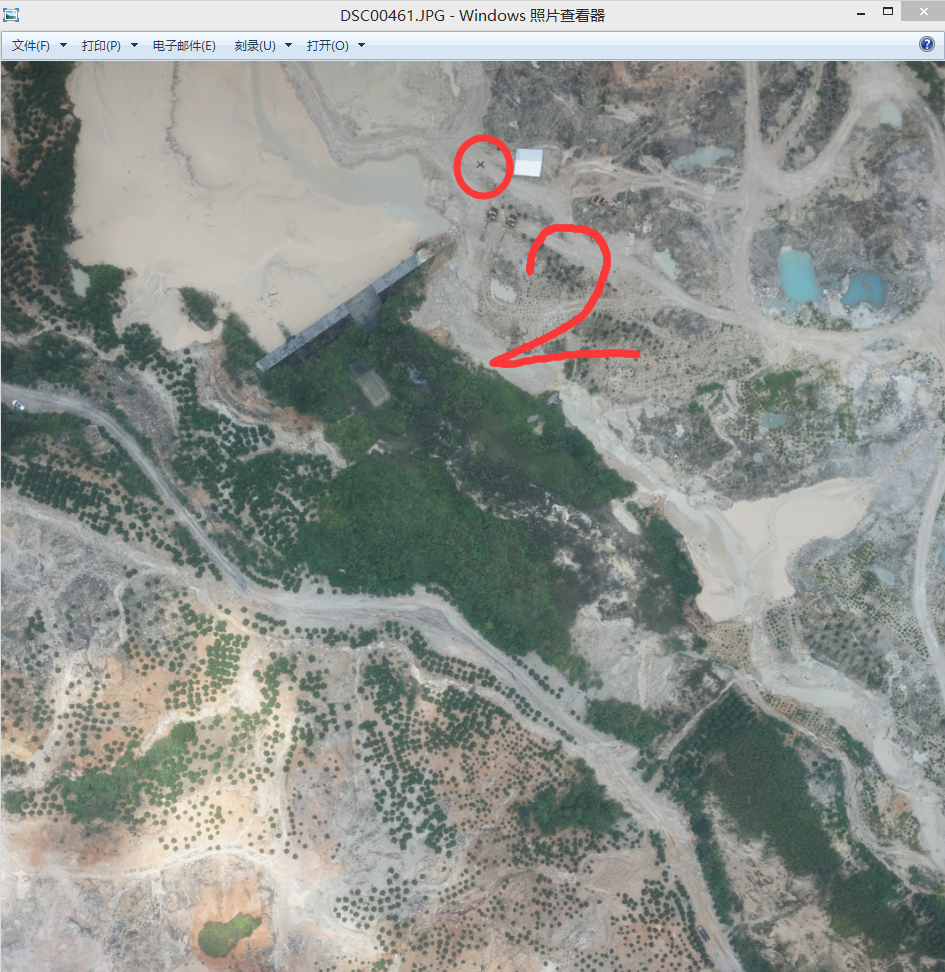
圖3:像控點(diǎn)

圖4:像控點(diǎn)采集
3.2 無(wú)人機(jī)外業(yè)數(shù)據(jù)采集
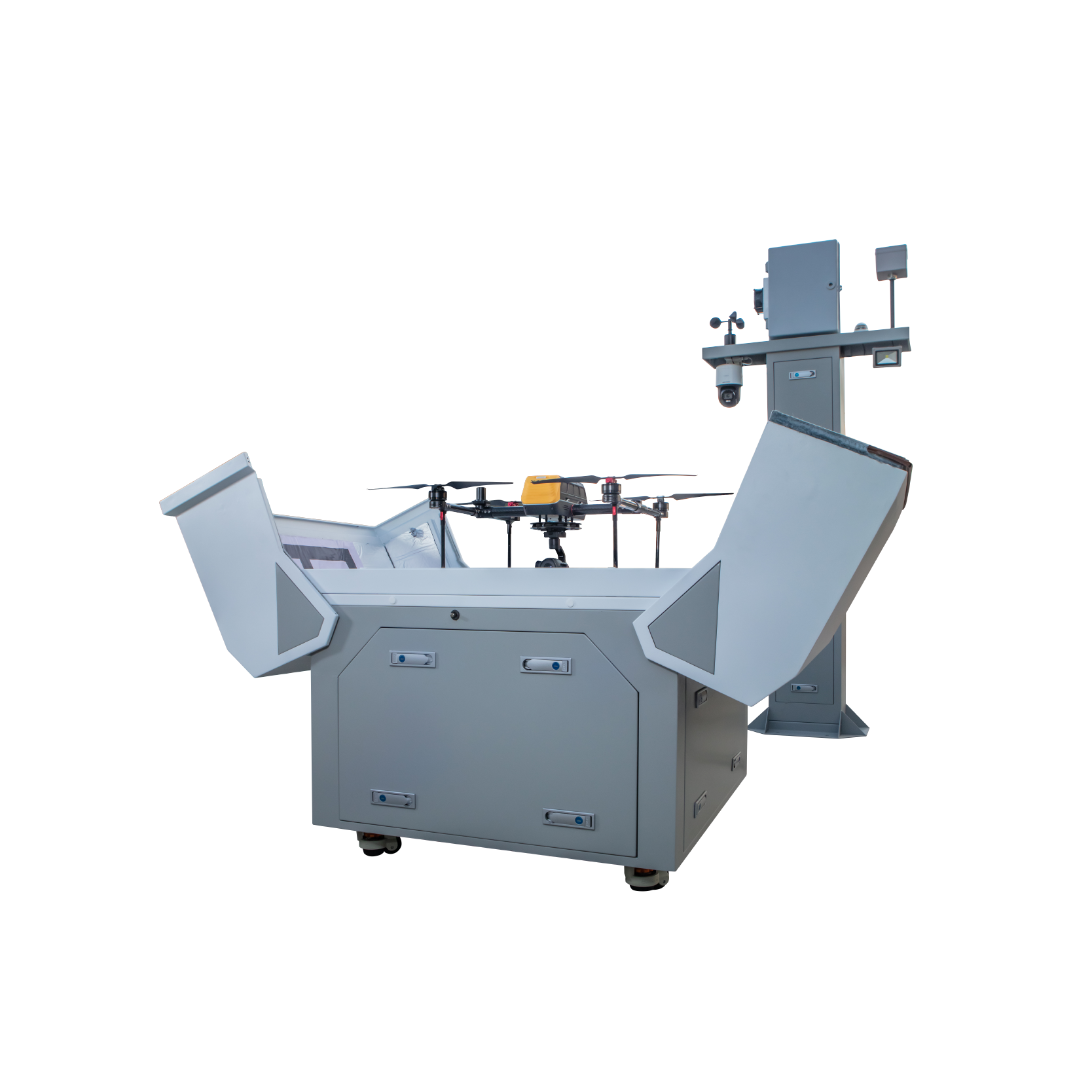
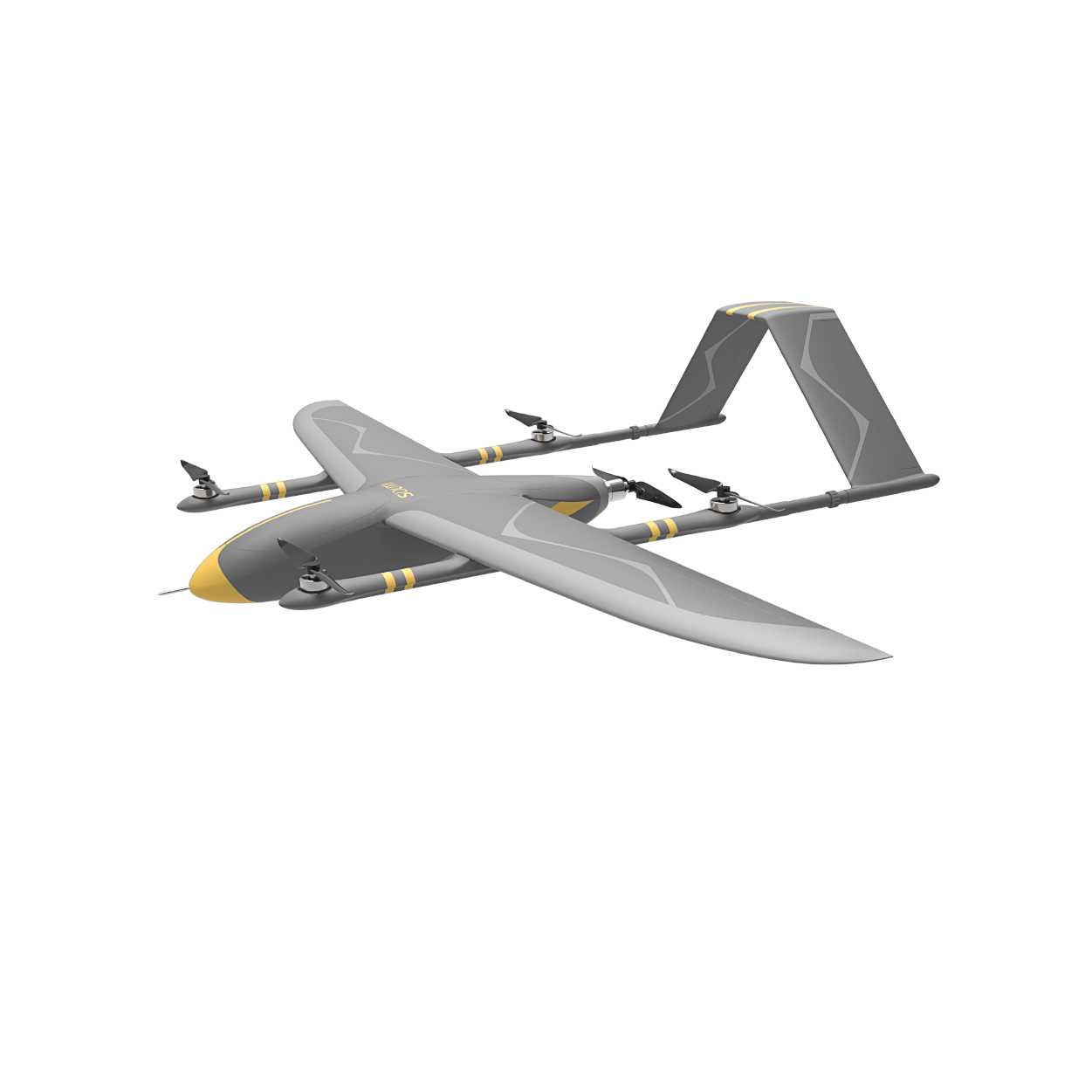
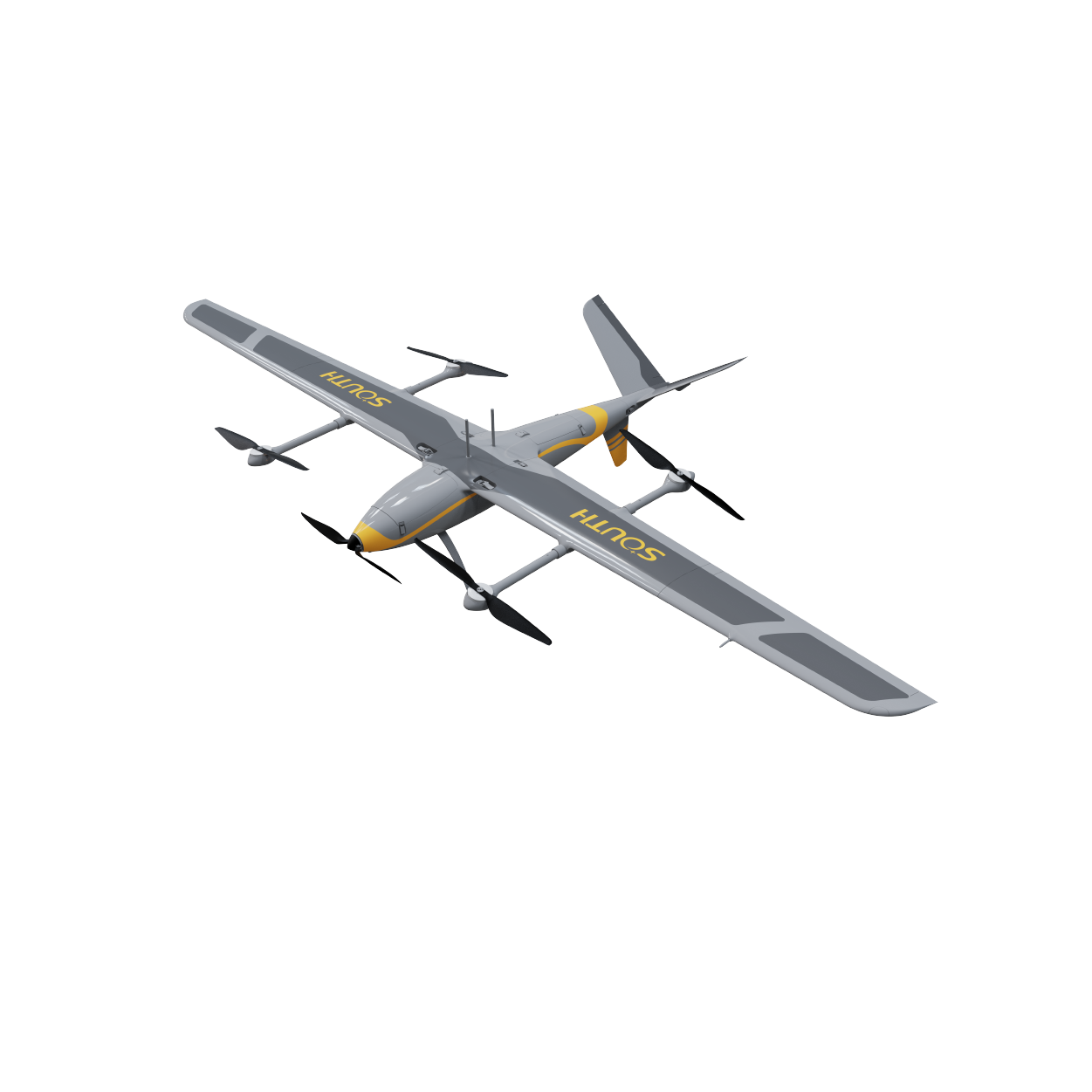
項(xiàng)目實(shí)施采用智航SF700A作為無(wú)人機(jī)飛行作業(yè)的平臺(tái),智航SF700A是目前市面上最為小巧得工業(yè)級(jí)智能無(wú)人機(jī)航空測(cè)量系統(tǒng)之一���。具有上手塊���、精度高、航程長(zhǎng)等優(yōu)勢(shì)�。具備仿地飛行、PPK定位、毫米波雷達(dá)避障�、下視激光雷達(dá)測(cè)距等功能配置。

圖7:智航SF700A無(wú)人機(jī)
南方無(wú)人機(jī)S24傾斜相機(jī)�����,是一款具備增穩(wěn)得小巧云臺(tái)��,能夠提高正射影像采集的精度與效率�。像素2400�����,完全滿足此次項(xiàng)目精度要求�。

圖8:S24傾斜相機(jī)
智航SF700A搭載S24相機(jī)進(jìn)行航空影像采集。作業(yè)得飛行高度為200米����,80%和70%得航向和旁向重疊度。在天氣及空域條件滿足時(shí)�����,項(xiàng)目組實(shí)施飛行作業(yè)�。項(xiàng)目組使用了中國(guó)移動(dòng)CORS系統(tǒng),通過(guò)試用實(shí)時(shí)RTK和后差分PPK結(jié)合得方式,獲取高精度POS信息�����,為影像空三及建模提供高質(zhì)量數(shù)據(jù)��。
3.3照片數(shù)據(jù)預(yù)整理
無(wú)人機(jī)外業(yè)作業(yè)完成后�����,需要對(duì)差分?jǐn)?shù)據(jù)和照片進(jìn)行整理�����?��;谀戏胶綔y(cè)一體化處理軟件SouthUAV 2.0�,可以實(shí)現(xiàn)實(shí)時(shí)差分解析�����、后差分?jǐn)?shù)據(jù)處理�、POS和照片分組對(duì)齊、相片重命名等操作�����。
南方航測(cè)一體化處理軟件,通過(guò)設(shè)備連接功能���,直接從鏡頭讀取影像數(shù)據(jù)���,也支持從磁盤(pán)內(nèi)讀取照片數(shù)據(jù),處理完成后將數(shù)據(jù)組織下載到指定位置���,支持多線程同時(shí)下載5鏡頭數(shù)據(jù)�����,并且提供兩種數(shù)據(jù)下載方式。支持自動(dòng)對(duì)齊架次照片分組��,自動(dòng)識(shí)別地面點(diǎn)及廢片�,一鍵清除地面點(diǎn)和多有鏡頭的廢片,也支持處理丟片�����、丟點(diǎn)等情況��,提供插值和標(biāo)記跳片工具,全方位處理所有數(shù)據(jù)異常情況�����。
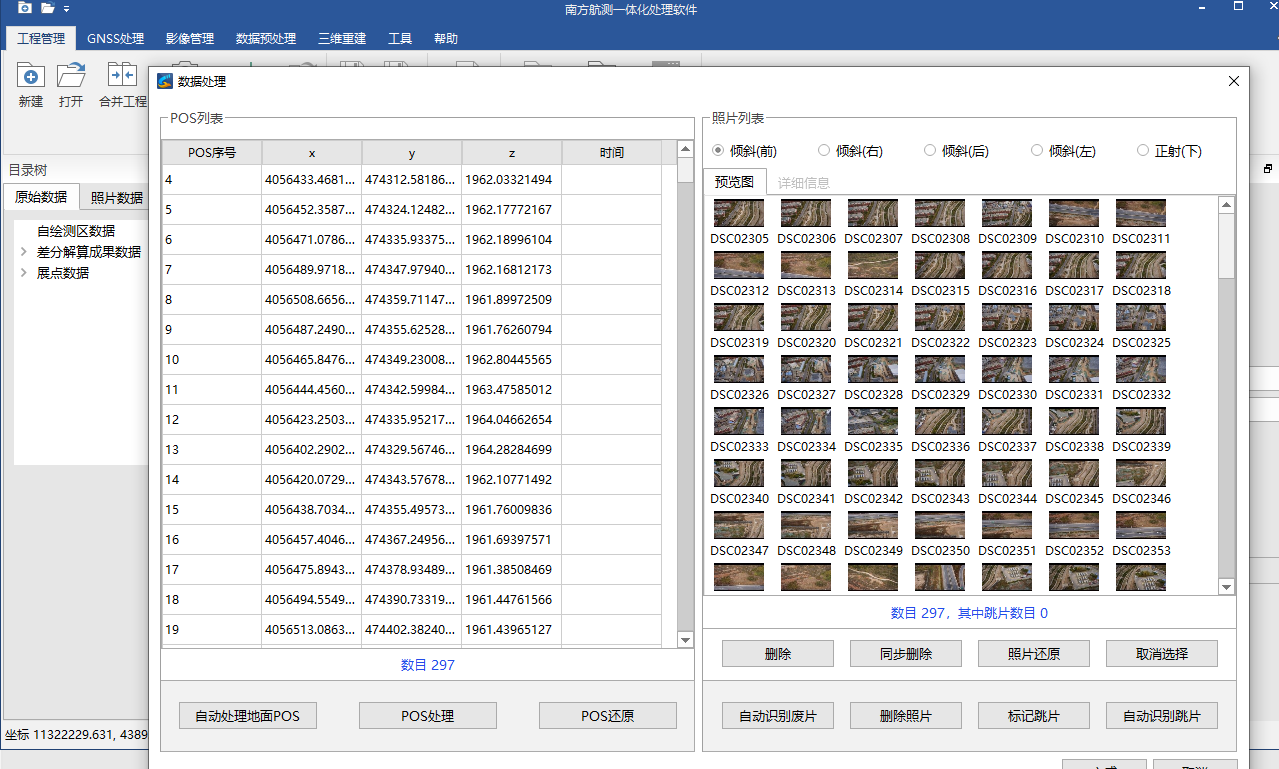
圖10:照片數(shù)據(jù)整理
3.4影像空三
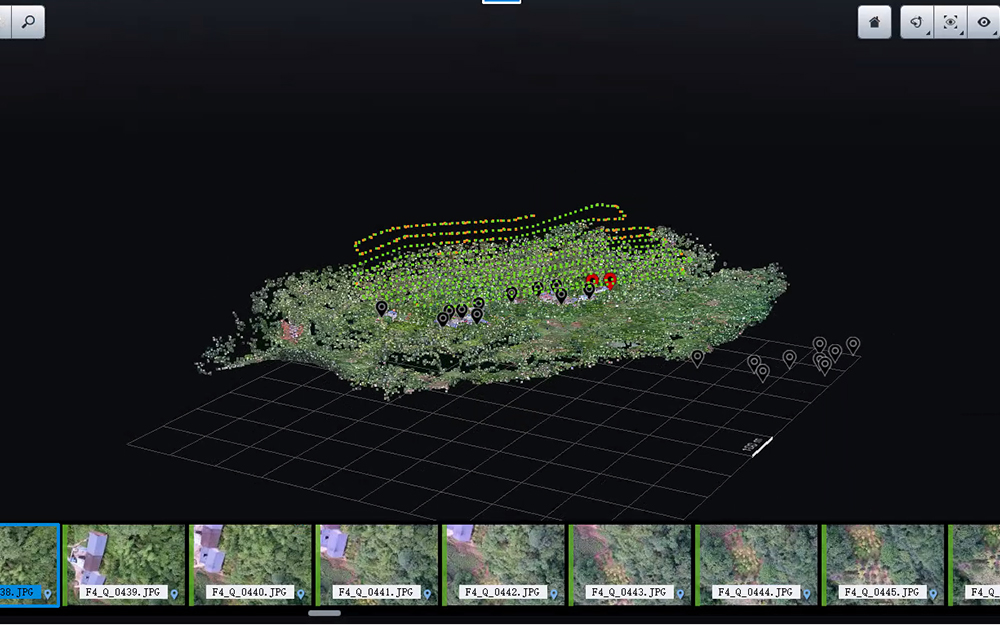
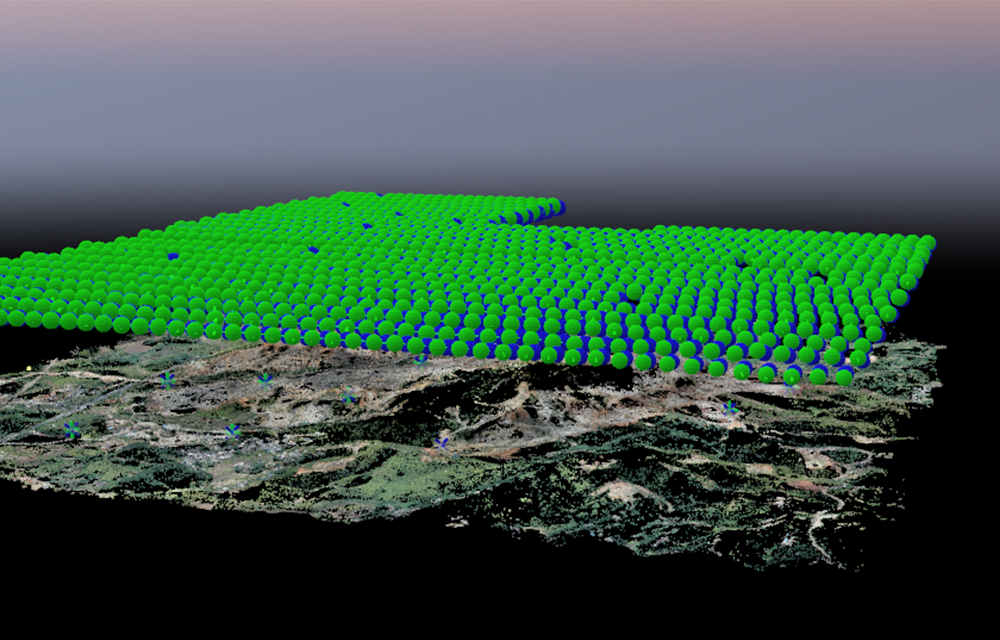
影像空三平差是傾斜攝影技術(shù)中的關(guān)鍵步驟����,影響到精度。項(xiàng)目組使用PIX4D軟件完成影像空三處理�。在處理過(guò)程中,刺點(diǎn)原則為:每個(gè)像控點(diǎn)刺點(diǎn)數(shù)量不能小于10張����,每個(gè)像控點(diǎn)每個(gè)鏡頭的刺點(diǎn)數(shù)量不少于3張,且每個(gè)鏡頭不能在同一條航線上���。
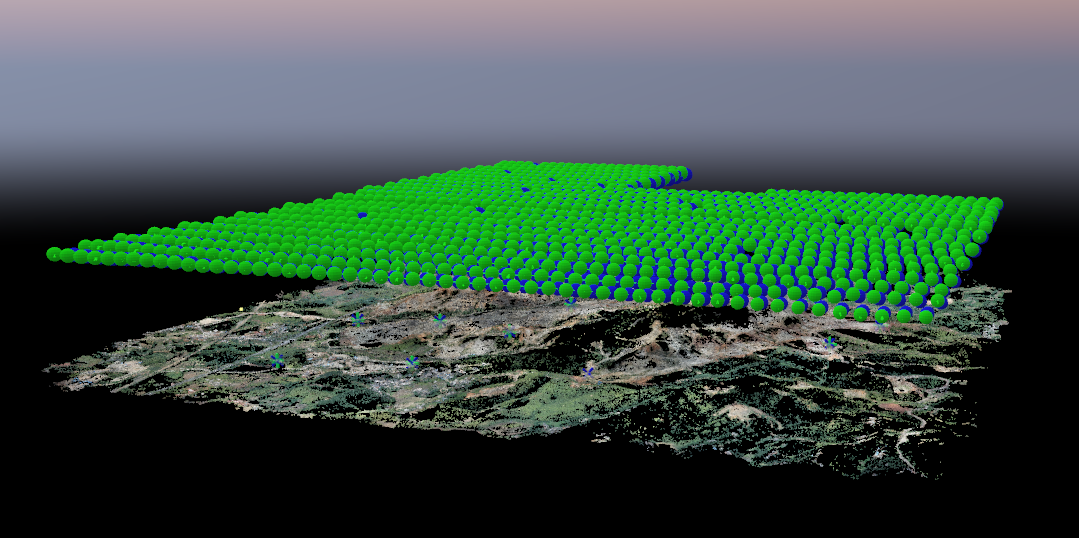
圖11:影像空三
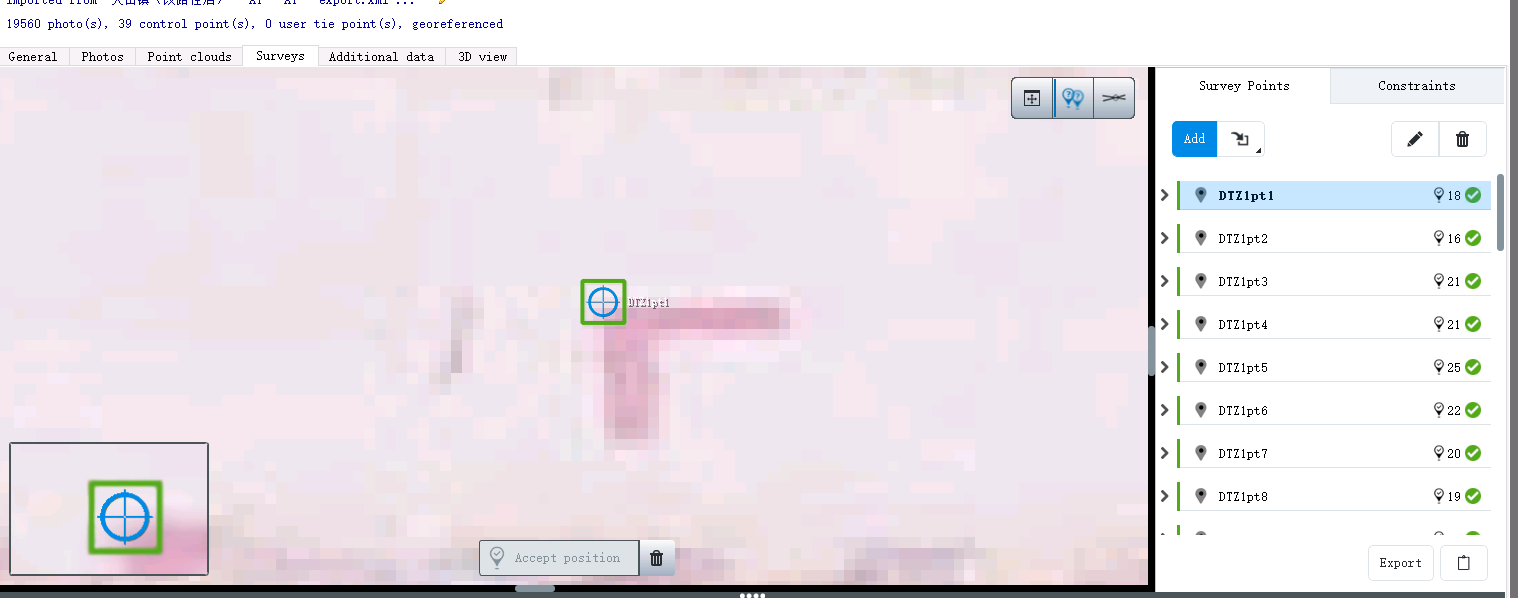
圖12:像控刺點(diǎn)
3.5 成果數(shù)據(jù)生成
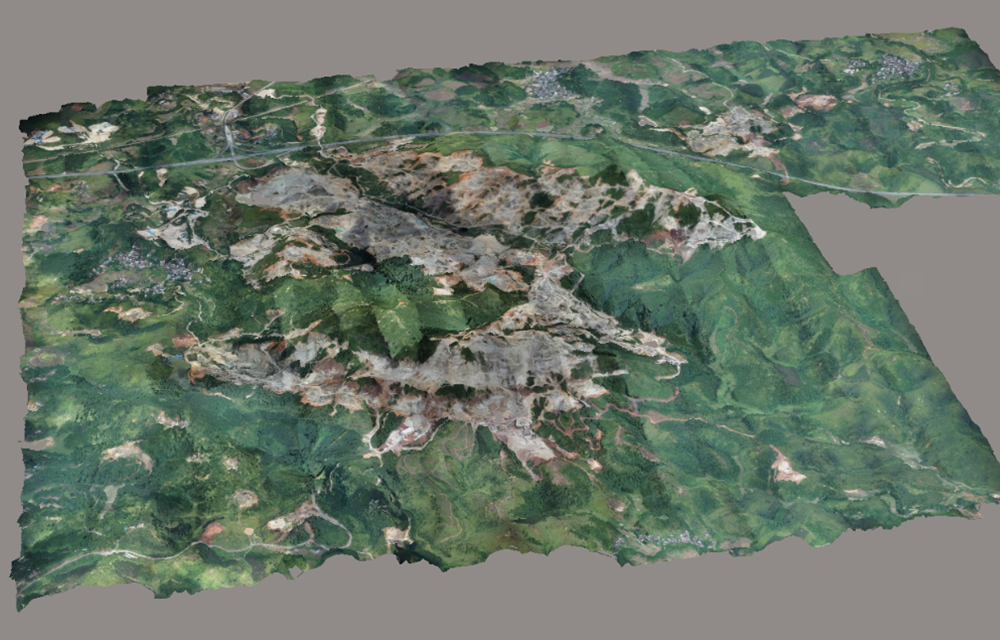
數(shù)字正射影像(DOM)生產(chǎn)是時(shí)間最長(zhǎng)的環(huán)節(jié)�����。項(xiàng)目組使用Pix4D軟件完成相關(guān)成果數(shù)據(jù)生產(chǎn)��。正射影像得效果及精度是后續(xù)測(cè)圖的基礎(chǔ)數(shù)據(jù)����,成果需要保證紋理清晰、精度準(zhǔn)確�����。
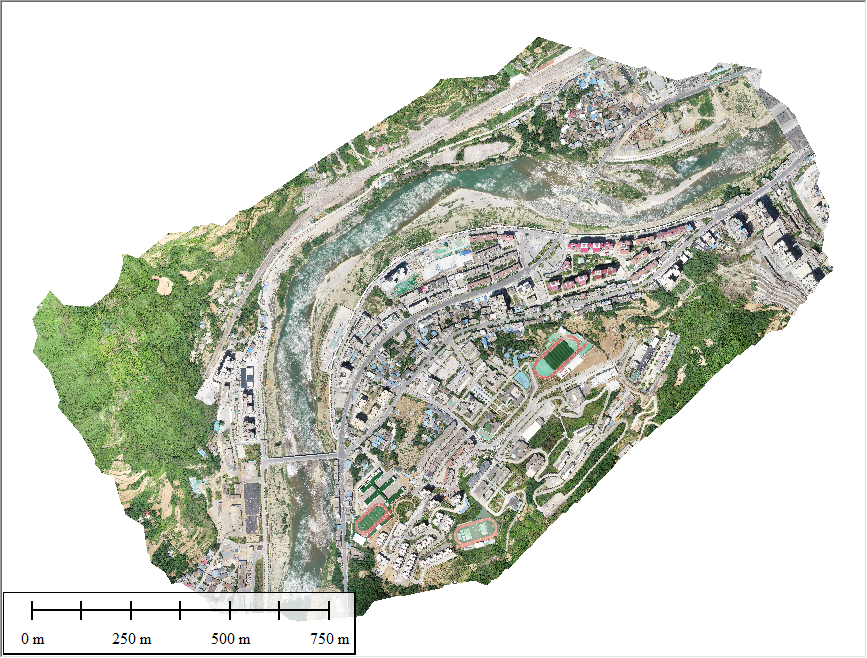
圖13:正射影像
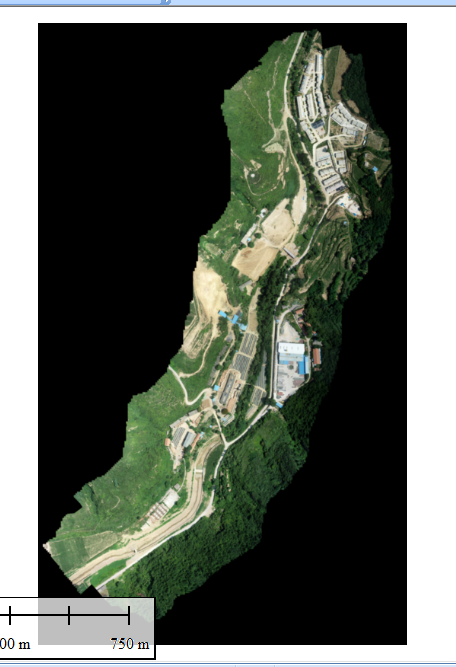
圖14:正射影像
3.6數(shù)字線劃圖生產(chǎn)
基于礦山三維實(shí)景模型采集地物要素�����,需要借助專(zhuān)門(mén)的數(shù)字線劃圖軟件���。項(xiàng)目組采用南方航測(cè)三維測(cè)圖軟件進(jìn)行數(shù)字線劃圖生產(chǎn)�。南方航測(cè)三維測(cè)圖軟件��,簡(jiǎn)稱(chēng):uFeature3D���,是一款集成測(cè)繪、CAD��、GIS三個(gè)領(lǐng)域?qū)嵱眉夹g(shù)的桌面信息化測(cè)繪系統(tǒng)���,系統(tǒng)提供空間和屬性數(shù)據(jù)的瀏覽��、查詢�、采集、編輯���、管理�、分析�、制圖輸出等與測(cè)繪和GIS的核心功能,包括三維采集模塊�,支持用戶在實(shí)景三維模型上進(jìn)行地物采集并成圖等工作,可以提供多種多樣的量測(cè)和繪圖工具�,滿足用戶多樣化的繪圖要求。
4.結(jié)果分析
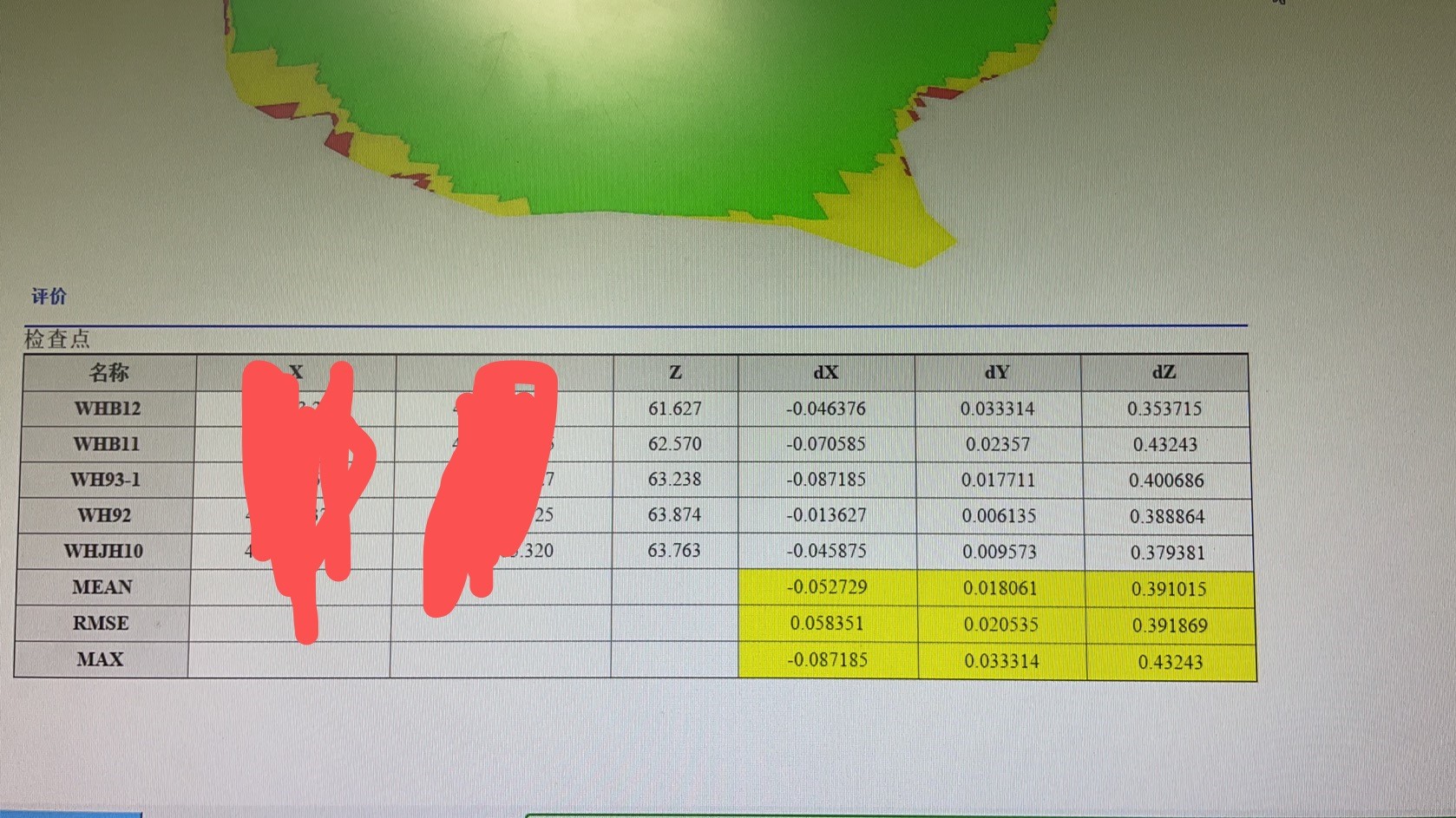
4.1精度分析
使用ContextCapture軟件進(jìn)行影像空三操作����,生成精度報(bào)告。在空三報(bào)告中查看所有控制點(diǎn)與檢查點(diǎn)誤差����,如果精度達(dá)到規(guī)范要求,可以進(jìn)行模型重建����。如果空三精度未能達(dá)到要求,查找對(duì)應(yīng)的原因�,解決相關(guān)問(wèn)題,重新進(jìn)行影像空三���,查看精度報(bào)告���,直至檢查點(diǎn)精度達(dá)到相關(guān)規(guī)范要求�。

5.總結(jié)
在實(shí)際項(xiàng)目實(shí)施過(guò)程中���,項(xiàng)目組得出如下總結(jié)及展望:
(1)此次項(xiàng)目的順利完成�,離不開(kāi)智航SF700A的精度高�����、航程長(zhǎng)�、平臺(tái)穩(wěn),S24相機(jī)提供的高像素�、高效率、高品質(zhì)���,以及覆蓋航測(cè)全流程的系統(tǒng)性軟件體系�����,包括智能化得南方航測(cè)一體化處理軟件SouthUAV2.0,簡(jiǎn)便式像控采集的像控之星���,滿足多樣化繪圖的南方航測(cè)三維測(cè)圖軟件uFeature3D�,云端互聯(lián)得無(wú)人機(jī)管控平臺(tái)系統(tǒng)。
(2)基于智航SF700A旋翼無(wú)人平臺(tái)搭載S24相機(jī)���,進(jìn)行輸油管線攝影測(cè)量��,獲取高精度正射影像�����,以此為基礎(chǔ)數(shù)據(jù)�,應(yīng)用到礦山勘查得全過(guò)程�����,包括野外踏勘的路線設(shè)計(jì)�����?���;谡溆跋袂捌谝?guī)劃,可以大大降低野外工作人員的勞動(dòng)強(qiáng)度,降低踏勘成本�,節(jié)省外業(yè)工作時(shí)間,提高外業(yè)生產(chǎn)效率�。